Trong kỷ nguyên Internet of Things (IoT), lập trình vi điều khiển đóng vai trò là xương sống của mọi thiết bị thông minh. Khác với lập trình ứng dụng trên máy tính, thực hiện mã nguồn trên vi điều khiển đòi hỏi kỹ sư phải am hiểu sâu sắc về kiến trúc phần cứng, quản lý bộ nhớ hữu hạn và khả năng xử lý thời gian thực. Bài viết này cung cấp cái nhìn chuyên sâu về hệ sinh thái nhúng, giúp bạn làm chủ quy trình phát triển từ mức Bare-metal đến các hệ điều hành thời gian thực (RTOS).
Kiến trúc phần cứng và mô hình bộ nhớ nhúng
Trước khi bắt đầu viết dòng code đầu tiên, kỹ sư cần nắm vững kiến trúc của bộ vi xử lý (CPU) tích hợp. Hai kiến trúc phổ biến nhất trong lập trình vi điều khiển là Harvard và Von Neumann. Kiến trúc Harvard (thường thấy trong dòng AVR hoặc ARM Cortex-M) tách biệt đường truyền dữ liệu và đường truyền mã lệnh, cho phép CPU truy cập đồng thời cả hai, từ đó tăng tốc độ thực thi.
Việc hiểu rõ bản đồ bộ nhớ (Memory Map) là bắt buộc. Một vi điều khiển điển hình sẽ có ba phân vùng chính: Flash (lưu trữ code), SRAM (lưu trữ biến tạm thời) và EEPROM (lưu trữ dữ liệu cấu hình không mất khi mất điện). Trong các dự án thực tế, việc sử dụng sai kiểu dữ liệu hoặc không tối ưu hóa ngăn xếp (Stack) có thể dẫn đến lỗi tràn bộ nhớ (Stack Overflow), một triệu chứng cực kỳ khó debug vì nó không xảy ra ngay lập tức mà thường xuất hiện ngẫu nhiên khi chương trình chạy lâu.
 Kiến trúc vi điều khiển AVR phổ biếnHình 1: Cấu tạo phân tầng chức năng của một chip vi điều khiển 8-bit hiện đại.
Kiến trúc vi điều khiển AVR phổ biếnHình 1: Cấu tạo phân tầng chức năng của một chip vi điều khiển 8-bit hiện đại.
Ngôn ngữ C và kỹ thuật thao tác thanh ghi
Mặc dù Python (MicroPython) hay Rust đang dần thâm nhập, nhưng ngôn ngữ C vẫn là tiêu chuẩn công nghiệp trong lập trình vi điều khiển nhờ sự cân bằng giữa hiệu suất và khả năng trừu tượng hóa. Khi phát triển phần mềm nhúng, bạn không chỉ làm việc với các hàm cao cấp mà còn phải thao tác trực tiếp trên các thanh ghi (Registers).
Một kỹ thuật quan trọng là sử dụng từ khóa volatile. Nhiều lập trình viên mới thường bỏ qua điều này, dẫn đến việc trình biên dịch (Compiler) tự động tối ưu hóa và loại bỏ các biến mà nó cho là không thay đổi, trong khi biến đó thực tế được cập nhật liên tục bởi phần cứng hoặc ngắt. Dưới đây là ví dụ về việc cấu hình ngoại vi GPIO trên dòng chip AVR (như ATmega328P) bằng cách ghi trực tiếp vào thanh ghi:
/
Ngôn ngữ: C (AVR-GCC)
Phiên bản: C99
Mục tiêu: Điều khiển trực tiếp thanh ghi để chớp tắt LED tại chân PB5 (Chân 13 Arduino)
/
#define F_CPU 16000000UL // Tần số thạch anh 16MHz
#include <avr/io.h>
#include <util/delay.h>
int main(void) {
// Thiết lập chân PB5 là OUTPUT bằng cách ghi 1 vào bit thứ 5 của thanh ghi DDRB
DDRB |= (1 << DDB5);
while (1) {
// Đảo trạng thái chân PB5 (XOR bit thứ 5 của thanh ghi PORTB)
PORTB ^= (1 << PORTB5);
// Trễ 500ms - Lưu ý: _delay_ms chỉ chính xác khi F_CPU được định nghĩa đúng
_delay_ms(500);
}
return 0;
}Input: Trạng thái thanh ghi DDRB mặc định. Output: Tín hiệu điện mức cao/thấp tuần hoàn tại chân PB5.
Phân tích độ phức tạp: Thao tác bit trực tiếp trên thanh ghi có độ phức tạp thời gian là O(1) và chiếm ít tài nguyên bộ nhớ nhất có thể. So với việc dùng hàm digitalWrite() của Arduino, cách tiếp cận Bare-metal này nhanh hơn gấp nhiều lần và giảm thiểu kích thước file binary sau khi biên dịch.
Cơ chế ngắt và quản lý thời gian thực
Trong các hệ thống nhúng phức tạp, việc sử dụng hàm trễ (delay) là một sai lầm nghiêm trọng vì nó làm treo CPU (Blocking). Thay vào đó, kỹ sư sử dụng ngắt (Interrupts) để phản hồi ngay lập tức với các sự kiện ngoại vi. Ngắt cho phép vi điều khiển tạm dừng chương trình chính, thực hiện một chương trình con (ISR – Interrupt Service Routine), sau đó quay lại vị trí cũ.
Khi triển khai ISR, bạn phải tuân thủ nguyên tắc: “Ngắn gọn tối đa”. Tuyệt đối không sử dụng các hàm trễ hoặc in dữ liệu (printf) bên trong ISR vì nó sẽ chiếm dụng tài nguyên và gây trễ cho các ngắt khác có ưu tiên thấp hơn. Theo tài liệu Cortex-M4 Devices Generic User Guide của ARM, việc quản lý ưu tiên ngắt (Priority Grouping) là chìa khóa để đảm bảo tính thời gian thực cho hệ thống.
 Mạch nạp và gỡ lỗi JTAG chuyên dụngHình 2: Sử dụng giao diện JTAG để trace mã nguồn và kiểm tra trạng thái thanh ghi theo thời gian thực.
Mạch nạp và gỡ lỗi JTAG chuyên dụngHình 2: Sử dụng giao diện JTAG để trace mã nguồn và kiểm tra trạng thái thanh ghi theo thời gian thực.
Giao diện ngoại vi và giao thức truyền thông
Khả năng kết nối là yếu tố quyết định giá trị của việc lập trình vi điều khiển. Có ba giao thức nối tiếp căn bản mà mọi lập trình viên phải thành thạo: UART, I2C và SPI. Mỗi giao thức có ưu và nhược điểm riêng, đòi hỏi sự lựa chọn kỹ lưỡng dựa trên khoảng cách truyền và tốc độ yêu cầu.
- UART (Universal Asynchronous Receiver/Transmitter): Truyền thông không đồng bộ, chỉ cần 2 dây (TX/RX). Thường dùng để giao tiếp với module GPS hoặc debug qua PC.
- I2C (Inter-Integrated Circuit): Giao thức 2 dây (SDA/SCL) hỗ trợ đa thiết bị trên cùng một bus. Tốc độ trung bình (100kbps – 400kbps), phù hợp cho các cảm biến nhiệt độ, áp suất.
- SPI (Serial Peripheral Interface): Giao thức 4 dây tốc độ cao (có thể lên tới hàng chục Mbps). Sử dụng cơ chế Master-Slave với chân chọn chip (SS), lý tưởng cho thẻ nhớ SD hoặc màn hình OLED.
Khi làm việc với các giao thức truyền thông, lỗi phổ biến nhất là không xử lý xung đột trên bus I2C hoặc quên kết nối Common Ground (mát chung) giữa hai thiết bị, dẫn đến tín hiệu bị nhiễu hoặc không ổn định.
 Sơ đồ kết nối giao thức I2CHình 3: Cấu trúc kết nối bus I2C với hệ thống các điện trở kéo lên (Pull-up resistors) bắt buộc.
Sơ đồ kết nối giao thức I2CHình 3: Cấu trúc kết nối bus I2C với hệ thống các điện trở kéo lên (Pull-up resistors) bắt buộc.
Điều chế độ rộng xung PWM và điều khiển ngoại vi
PWM (Pulse Width Modulation) là kỹ thuật quan trọng nhất trong lập trình vi điều khiển để giả lập tín hiệu tương tự (Analog) từ các chân kỹ thuật số (Digital). Bằng cách thay đổi chu kỳ nhiệm vụ (Duty Cycle), chúng ta có thể điều khiển tốc độ động cơ DC, độ sáng LED hoặc điều khiển góc quay của Servo.
Hầu hết các vi điều khiển hiện đại như STM32 hay PIC đều tích hợp sẵn các bộ Timer/Counter mạnh mẽ để tạo xung PWM phần cứng. Việc sử dụng PWM phần cứng giúp CPU hoàn toàn rảnh tay để thực hiện các thuật toán tính toán khác, thay vì phải liên tục bật/tắt chân GPIO bằng phần mềm.
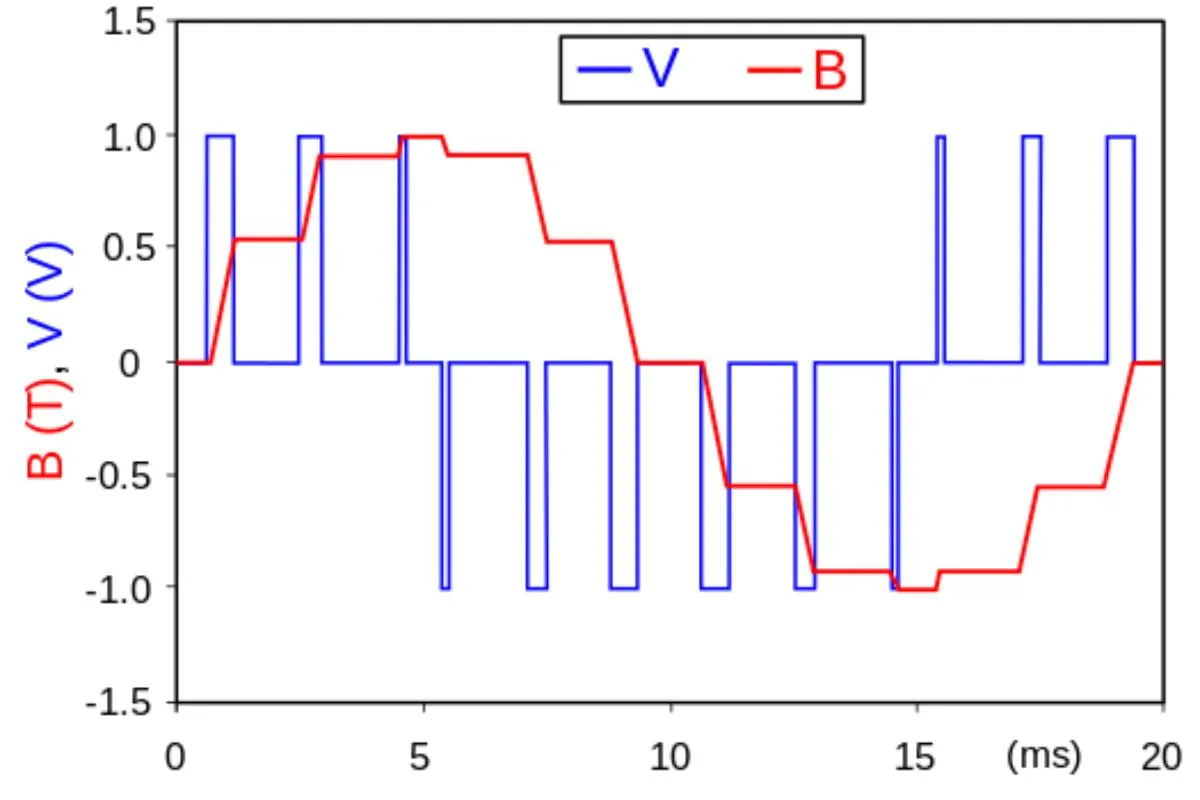 Minh họa sóng PWM điều khiển thiết bịHình 4: Sự thay đổi Duty Cycle ảnh hưởng trực tiếp đến điện áp trung bình đầu ra.
Minh họa sóng PWM điều khiển thiết bịHình 4: Sự thay đổi Duty Cycle ảnh hưởng trực tiếp đến điện áp trung bình đầu ra.
Lựa chọn nền tảng: Từ Arduino đến STM32 và Raspberry Pi
Việc chọn “trái tim” cho dự án phụ thuộc vào yêu cầu bài toán. Nếu bạn là người mới bắt đầu, Arduino là sự khởi đầu tuyệt vời nhờ cộng đồng thư viện khổng lồ. Tuy nhiên, trong sản xuất công nghiệp, các dòng chip như STM32 (ARM-based) được ưu tiên hơn nhờ hiệu suất vượt trội, nhiều bộ ngoại vi tích hợp và trình gỡ lỗi chuyên nghiệp.
Ngược lại, nếu dự án cần xử lý ảnh, trí tuệ nhân tạo hoặc các tác vụ nặng về giao thức mạng, Raspberry Pi (một máy tính nhúng chạy Linux) sẽ là lựa chọn phù hợp. Tuy nhiên, lưu ý rằng Raspberry Pi không phải là một vi điều khiển thuần túy; nó không có tính năng thời gian thực cứng (Hard Real-time) như dòng MCU chuyên dụng trừ khi được cài đặt nhân RT-Linux.
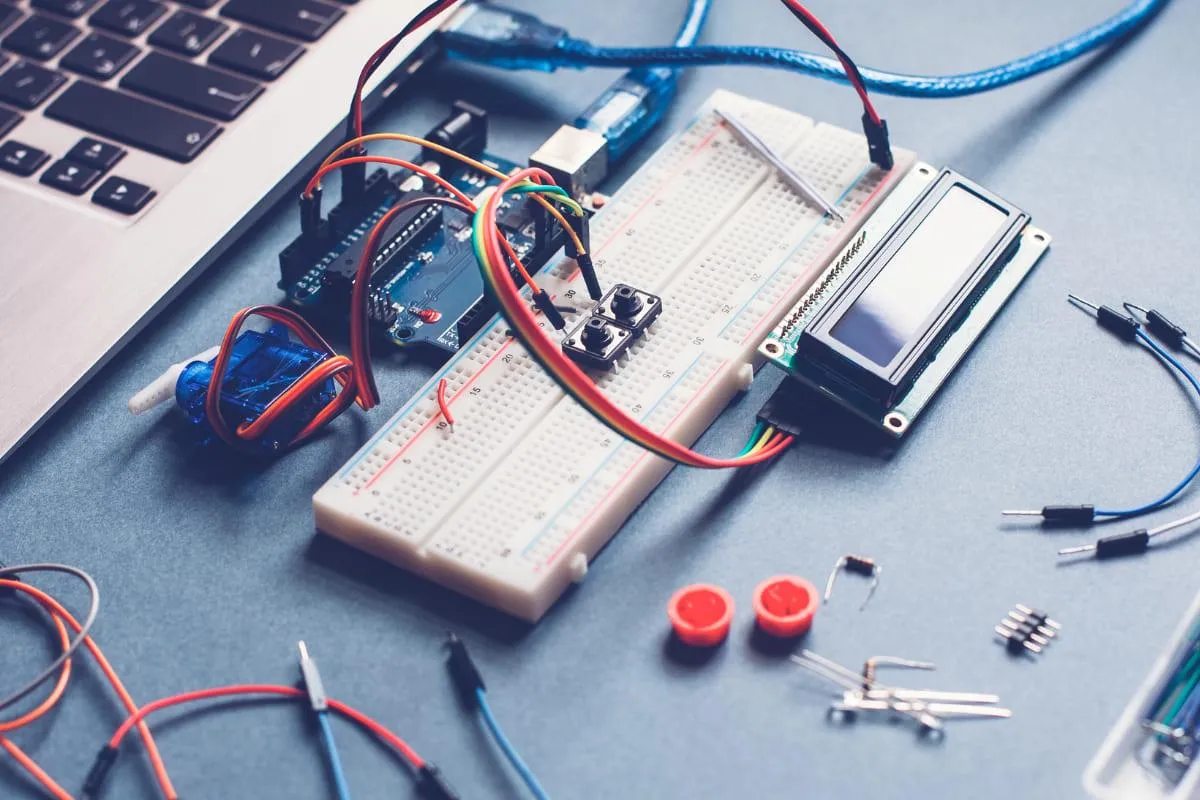
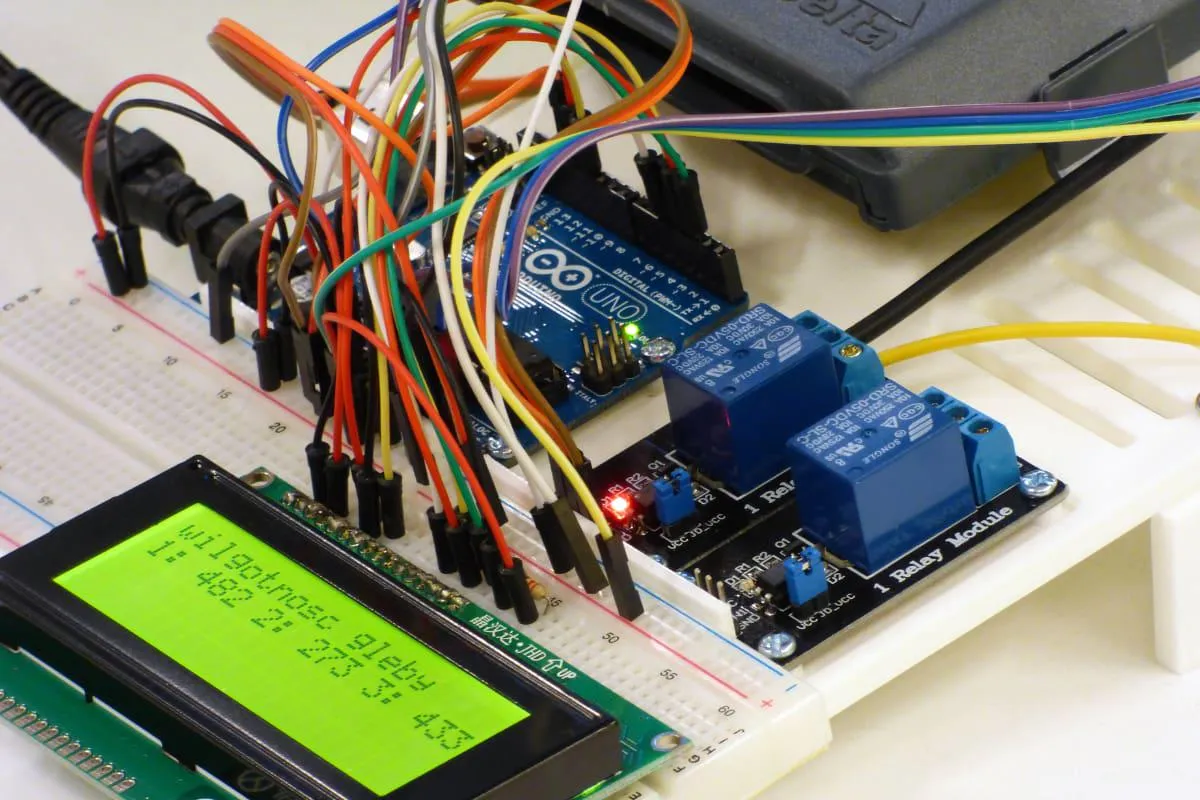 Hệ sinh thái Arduino cho người mớiHình 5: Board mạch Arduino Uno R3 — nền tảng phổ biến nhất để tiếp cận lập trình nhúng.
Hệ sinh thái Arduino cho người mớiHình 5: Board mạch Arduino Uno R3 — nền tảng phổ biến nhất để tiếp cận lập trình nhúng.
 Máy tính nhúng Raspberry PiHình 6: Raspberry Pi cung cấp sức mạnh tính toán vượt trội cho các ứng dụng IoT phức tạp.
Máy tính nhúng Raspberry PiHình 6: Raspberry Pi cung cấp sức mạnh tính toán vượt trội cho các ứng dụng IoT phức tạp.
Quy trình gỡ lỗi và tối ưu hóa hệ thống
Debugger (trình gỡ lỗi) là công cụ phân tách kỹ sư chuyên nghiệp và amateur. Thay vì dùng printf để xem biến, một chuyên gia về lập trình vi điều khiển sẽ sử dụng mạch nạp như ST-Link hoặc J-Link để đặt các điểm dừng (Breakpoints), xem danh sách các lệnh Assembly đang thực thi và theo dõi giá trị thực tế của từng bit trong thanh ghi.
Tối ưu hóa năng lượng cũng là một chủ đề nâng cao. Đối với các thiết bị chạy pin, bạn cần tận dụng các chế độ Sleep (Sleep Modes) của MCU. Thay vì để chip hoạt động 100% thời gian, chúng ta cấu hình để chip “ngủ” và chỉ “thức dậy” khi có ngắt từ cảm biến hoặc bộ định thời (Timer). Điều này có thể kéo dài tuổi thọ pin từ vài ngày lên đến vài năm.
 Môi trường phát triển STM32CubeIDEHình 7: Hệ sinh thái STM32 cung cấp công cụ cấu hình đồ họa trực quan và mạnh mẽ.
Môi trường phát triển STM32CubeIDEHình 7: Hệ sinh thái STM32 cung cấp công cụ cấu hình đồ họa trực quan và mạnh mẽ.
 Quản lý mã nguồn với GitHình 8: Sử dụng hệ thống quản lý phiên bản Git là tiêu chuẩn bắt buộc trong phát triển firmware chuyên nghiệp.
Quản lý mã nguồn với GitHình 8: Sử dụng hệ thống quản lý phiên bản Git là tiêu chuẩn bắt buộc trong phát triển firmware chuyên nghiệp.
Giao diện UART và ứng dụng trong giám sát dữ liệu
UART thường bị coi nhẹ vì sự đơn giản, nhưng trong debug thực tế, nó là kênh truyền dữ liệu đáng tin cậy nhất. Một lỗi phổ biến khi lập trình vi điều khiển truyền UART là lệch Baud rate. Nếu hai thiết bị không có cùng tần số lấy mẫu, dữ liệu nhận được sẽ là những ký tự rác.
/
Ngôn ngữ: C++ (Arduino/PlatformIO)
Phiên bản: Framework Arduino 2.x
Mô tả: Truyền dữ liệu cảm biến qua UART với xử lý không chặn (Non-blocking)
/
unsigned long lastMillis = 0;
const long interval = 1000; // Gửi dữ liệu mỗi 1 giây
void setup() {
Serial.begin(115200); // Thiết lập Baud rate 115200
while (!Serial); // Chờ cổng Serial sẵn sàng
}
void loop() {
unsigned long currentMillis = millis();
// Sử dụng mô hình máy trạng thái đơn giản thay vì delay()
if (currentMillis - lastMillis >= interval) {
lastMillis = currentMillis;
int sensorValue = analogRead(A0);
Serial.print("Sensor Data: ");
Serial.println(sensorValue);
}
}Input: Điện áp analog tại chân A0. Output: Chuỗi định dạng ASCII truyền qua cổng COM ảo.
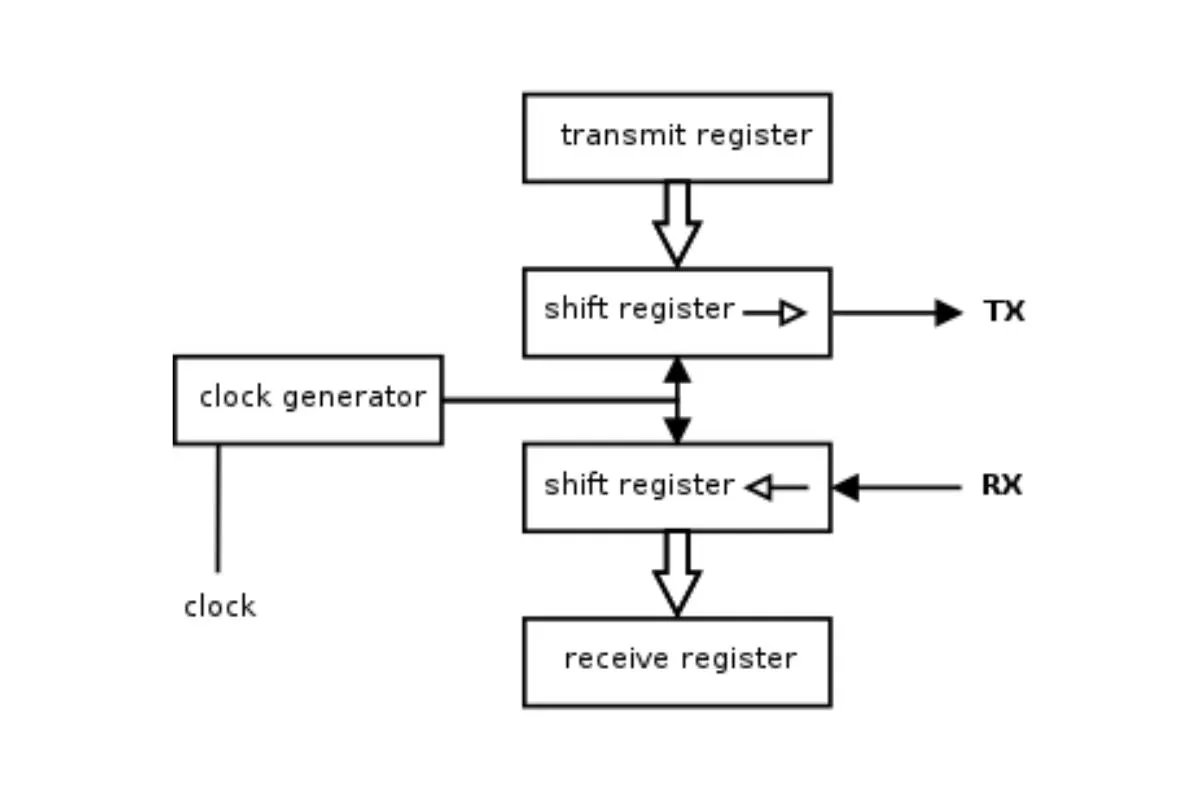 Sơ đồ logic giao tiếp UARTHình 9: Frame dữ liệu UART bao gồm Start bit, Data bits và Stop bit để đồng bộ hóa.
Sơ đồ logic giao tiếp UARTHình 9: Frame dữ liệu UART bao gồm Start bit, Data bits và Stop bit để đồng bộ hóa.
Hành trình trở thành chuyên gia lập trình vi điều khiển đòi hỏi sự kiên trì trong việc đọc tài liệu Datasheet hàng ngàn trang và thực hành debug thực tế. Hãy bắt đầu từ những dự án nhỏ, làm chủ từng ngoại vi, sau đó tiến tới các kiến trúc phức tạp hơn để xây dựng những hệ thống nhúng đột phá trong tương lai.
Cập nhật lần cuối 05/03/2026 by Hiếu IT