Biến tần INVT cho phép điều khiển động cơ với tối đa 16 cấp tốc độ khác nhau thông qua tổ hợp 4 tín hiệu đầu vào số. Khả năng này giúp tối ưu hóa quy trình sản xuất khi máy móc cần vận hành ở nhiều tốc độ khác nhau trong các giai đoạn công nghệ.
Nguyên Lý Hoạt Động Của Chế Độ Đa Cấp Tốc Độ
Hệ thống cài đặt biến tần INVT sử dụng 4 đầu vào số (S3, S4, S5, S6) để tạo ra 16 tổ hợp khác nhau. Mỗi tổ hợp tương ứng với một cấp tốc độ đã được lập trình sẵn. Khi tín hiệu đầu vào thay đổi, biến tần tự động chuyển động cơ sang tốc độ tương ứng mà không cần dừng máy. Quy trình này tương tự như cài đặt biến tần INVT GD200A.
Cơ chế này hoạt động dựa trên logic nhị phân: 4 tín hiệu ON/OFF tạo ra 2⁴ = 16 trạng thái. Ví dụ, khi cả 4 tín hiệu đều OFF, động cơ chạy ở cấp tốc độ 0; khi chỉ S3 ON, động cơ chuyển sang cấp tốc độ 1.
Quy Trình Cấu Hình Cơ Bản
Xác Định Sơ Đồ Đấu Nối
Trước khi cài đặt biến tần INVT, cần xác định rõ nguồn tín hiệu điều khiển. Các đầu vào S1-S6 có thể nhận tín hiệu từ:
- Tiếp điểm relay trung gian
- Ngõ ra transistor của PLC
- Bo điều khiển logic khác
Đầu vào S1 điều khiển chiều quay thuận, S2 điều khiển chiều quay nghịch. Bốn đầu vào S3-S6 kết hợp để chọn 1 trong 16 cấp tốc độ.
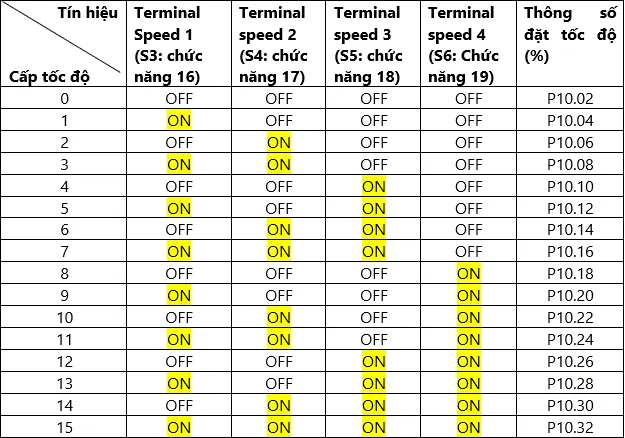 Bảng tín hiệu điều khiển các cấp tốc độ biến tần INVT
Bảng tín hiệu điều khiển các cấp tốc độ biến tần INVT
Cấu Hình Thông Số Chế Độ Điều Khiển
Nhóm thông số P00 xác định nguồn lệnh và nguồn đặt tốc độ:
P00.01 = 1 chuyển nguồn lệnh RUN/STOP sang terminal thay vì bàn phím. Điều này bắt buộc khi sử dụng tín hiệu ngoài để khởi động.
P00.06 = 6 kích hoạt chế độ đa cấp tốc độ. Giá trị này báo cho biến tần biết rằng tốc độ sẽ được xác định bởi tổ hợp tín hiệu số, không phải potentiometer hay tín hiệu analog.
Gán Chức Năng Cho Các Đầu Vào Số
Nhóm thông số P05 định nghĩa chức năng của từng terminal:
P05.01 = 1 (S1: Lệnh chạy thuận) P05.02 = 2 (S2: Lệnh chạy nghịch) P05.03 = 16 (S3: Bit 0 của mã cấp tốc độ) P05.04 = 17 (S4: Bit 1 của mã cấp tốc độ) P05.05 = 18 (S5: Bit 2 của mã cấp tốc độ) P05.06 = 19 (S6: Bit 3 của mã cấp tốc độ)Các giá trị 16-19 là mã chức năng đặc biệt trong biến tần INVT để nhận diện tín hiệu đa cấp tốc độ.
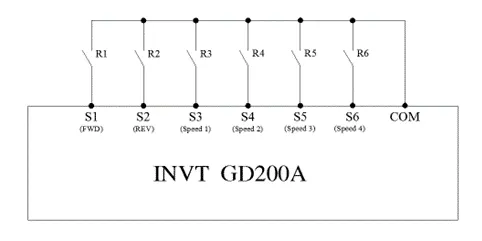 Sơ đồ đấu nối biến tần INVT điều khiển đa cấp tốc độ
Sơ đồ đấu nối biến tần INVT điều khiển đa cấp tốc độ
Thiết Lập Giá Trị Tốc Độ Cho Từng Cấp
Nhóm thông số P10 lưu trữ giá trị phần trăm tốc độ cho 16 cấp. Mỗi cấp có 2 thông số: giá trị phần trăm (P10.02, P10.04…) và thời gian tăng tốc riêng (P10.03, P10.05…).
Công thức tính tốc độ thực tế:
f = (p × P00.03) / 100
Trong đó:
- f: Tần số đầu ra (Hz)
- p: Phần trăm đặt trong P10.xx
- P00.03: Tần số tối đa của biến tần
Ví dụ thực tế: Nếu P00.03 = 50Hz và bạn muốn cấp tốc độ 3 chạy ở 30Hz, thì P10.08 = (30/50) × 100 = 60%.
⚠️ Lưu ý: Giá trị âm trong P10.xx sẽ khiến động cơ quay nghịch khi có lệnh chạy, bất kể trạng thái của S1/S2.
Ví Dụ Cấu Hình Cụ Thể
Giả sử máy cần 4 tốc độ: 10Hz, 25Hz, 40Hz, 50Hz với tần số max là 50Hz:
P10.02 = 20% (Cấp 0: 10Hz) P10.04 = 50% (Cấp 1: 25Hz) P10.06 = 80% (Cấp 2: 40Hz) P10.08 = 100% (Cấp 3: 50Hz)Các cấp còn lại (4-15) có thể để giá trị 0% nếu không sử dụng.
Kiểm Tra Và Vận Hành
Sau khi hoàn tất cài đặt biến tần INVT, thực hiện kiểm tra từng cấp tốc độ:
- Kích hoạt S1 để cho phép động cơ chạy
- Thay đổi tổ hợp S3-S6 theo bảng mã nhị phân
- Quan sát tần số hiển thị trên màn hình biến tần
- Đo tốc độ thực tế của động cơ bằng tachometer nếu cần độ chính xác cao
Nếu tốc độ không đúng, kiểm tra lại giá trị P10.xx hoặc thông số P00.03. Nếu động cơ không phản ứng với thay đổi tín hiệu, xác minh lại cấu hình P05.03-P05.06.
Xử Lý Tình Huống Thường Gặp
Động cơ không chuyển cấp tốc độ: Kiểm tra thời gian trễ tín hiệu đầu vào. Một số PLC cần thời gian ổn định tín hiệu trước khi biến tần nhận diện được thay đổi.
Tốc độ dao động không ổn định: Có thể do nhiễu trên đường tín hiệu điều khiển. Sử dụng dây tín hiệu có chắn nhiễu và tách riêng với dây động lực.
Biến tần báo lỗi khi chuyển cấp: Kiểm tra thông số gia tốc/giảm tốc (P10.03, P10.05…). Thời gian quá ngắn có thể gây quá dòng.
Với hướng dẫn này, bạn có thể tự tin triển khai hệ thống điều khiển đa cấp tốc độ cho biến tần INVT. Chế độ này đặc biệt hữu ích cho băng tải, máy trộn, quạt công nghiệp và các ứng dụng cần thay đổi tốc độ linh hoạt theo quy trình sản xuất.
Cập nhật lần cuối 15/03/2026 by Hiếu IT